Energy barrier and minimum energy path
This notebook computes the energy barrier between two cluster configurations using the string method (zero-temperature string method / nudged elastic band).
The string method finds the minimum energy path (MEP) connecting two configurations \(\mathbf{q}_0\) and \(\mathbf{q}_1\) in configuration space. Along the MEP, the gradient of the energy is everywhere parallel to the path (no perpendicular component), so the path represents the most probable escape route out of an energy minimum.
The energy barrier is:
and the static friction force is \(F_s = \max_s |\nabla_\mathbf{q} E|\) along the MEP — the minimum external force required to push the cluster over the barrier.
We cover two cases: 1. 2D translational MEP: CM slides at fixed orientation \((x_\text{cm}, y_\text{cm})\) 2. 3D roto-translational MEP: CM slides and cluster rotates \((x_\text{cm}, y_\text{cm}, \theta)\)
[1]:
import numpy as np
from numpy import sqrt
import matplotlib.pyplot as plt
from time import time
from flake.substrate import substrate_from_params, calc_matrices_bvect, get_ks
from flake.cluster import rotate, cluster_from_params
from flake.maps import translational_map, rotational_map
from flake.string_method import find_mep
from flake.plot import get_brillouin_zone_2d, plot_BZ2d, plot_UC, plt_cosmetic
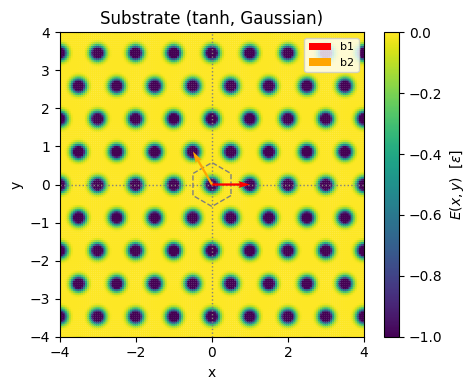
System definition
Tanh-well substrate (triangular lattice) with a nearly-commensurate circular cluster. \(\rho = 1 + 1/21 \approx 1.048\) introduces a small mismatch; try \(\rho = 1\) for the fully commensurate case where the barrier is maximum.
[2]:
rho = 1.0 + 1/21. # rho=1: commensurate. Try rho=1+1/21 to see barrier drop.
params = {
# --- SUBSTRATE ---
'sub_basis': [[0, 0]],
'b1': [1, 0],
'b2': [-1./2., sqrt(3.)/2.],
'epsilon': 1,
'well_shape': 'tanh',
'sigma': 0.1, 'a': 0.1, 'b': 0.45, 'wd': 0.25,
# --- CLUSTER ---
'a1': list(rho * np.array([1., 0.])),
'a2': list(rho * np.array([1./2., -sqrt(3.)/2.])),
'cl_basis': [[0, 0]],
'cluster_shape': 'circle',
'N1': 25, 'N2': 25,
# theta and pos_cm are initial conditions for dynamics, NOT baked into pos.
'theta': 0, 'pos_cm': [0, 0.],
}
u, u_inv = calc_matrices_bvect(params['b1'], params['b2'])
S = u_inv.T # rows are b1, b2 (for plotting)
bz_kw = {'ls': '--', 'color': 'tab:gray', 'lw': 1, 'fill': False}
pen_func, en_func, en_inputs = substrate_from_params(params)
[3]:
# Single-particle substrate potential on a 2D grid -- sanity check.
x0, x1, nx = -4, 4, 150
y0, y1, ny = -4, 4, 150
xx, yy = np.meshgrid(np.linspace(x0, x1, nx), np.linspace(y0, y1, ny))
p = np.reshape(np.stack([xx, yy], axis=2), (-1, 2))
en, F, tau = pen_func(p, [0, 0], *en_inputs)
fig, ax = plt.subplots(dpi=100, figsize=(5, 4))
sc = ax.scatter(p[:, 0], p[:, 1], c=en, s=1, rasterized=True)
plt.colorbar(sc, label=r'$E(x,y)$ [$\epsilon$]', ax=ax)
plot_BZ2d(ax, get_brillouin_zone_2d(S), bz_kw)
ax.quiver(0, 0, *S[0], angles='xy', scale_units='xy', scale=1,
zorder=5, color='red', label='b1')
ax.quiver(0, 0, *S[1], angles='xy', scale_units='xy', scale=1,
zorder=5, color='orange', label='b2')
ax.legend(loc='upper right', fontsize=8)
ax.set_xlim([x0, x1])
ax.set_ylim([y0, y1])
ax.set_xlabel('x [a.u.]')
ax.set_ylabel('y [a.u.]')
ax.set_title('Substrate (%s, Gaussian)' % params['well_shape'])
plt_cosmetic(ax)
plt.tight_layout()
plt.show()
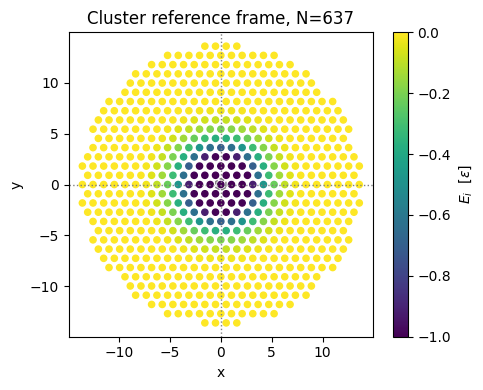
Cluster
[4]:
# cluster_from_params returns pos in the REFERENCE FRAME: CM at origin, theta=0.
# theta and pos_cm from params are NOT applied here -- new API convention.
pos = cluster_from_params(params)
N = pos.shape[0]
print('Cluster %s, N=%i' % (params['cluster_shape'], N))
pos_cm_arr = np.asarray(params['pos_cm'])
pen, pF, ptau = pen_func(pos, pos_cm_arr, *en_inputs)
fig, ax = plt.subplots(dpi=100, figsize=(5, 4))
sc = ax.scatter(pos[:, 0], pos[:, 1], c=pen, s=20, vmin=-params['epsilon'], vmax=0)
plt.colorbar(sc, label=r'$E_i$ [$\epsilon$]', ax=ax)
plot_BZ2d(ax, get_brillouin_zone_2d(S), bz_kw)
ax.set_xlabel('x [a.u.]')
ax.set_ylabel('y [a.u.]')
ax.set_title('Cluster reference frame, N=%d' % N)
plt_cosmetic(ax)
plt.tight_layout()
plt.show()
Cluster circle, N=637
Translational energy landscape
Compute \(E(x_\text{cm}, y_\text{cm})\) at fixed orientation \(\theta\). We pre-rotate pos to the desired \(\theta\) before calling translational_map (which treats pos as a fixed rigid body).
[5]:
pos_rot = rotate(pos, params['theta'])
t0 = time()
map_result = translational_map(
pos_rot, en_func, en_inputs, u_inv,
n_x=200, n_y=200,
frac_x=(-1.5, 1.5), frac_y=(-1.5, 1.5),
)
te = time() - t0
print('Map done: %is (%.2fmin)' % (te, te/60))
pp = map_result['pos_cm']
enmap = map_result['energy']
Fmap = map_result['force']
taumap = map_result['torque']
# Reshape to 2D for contour plotting (n_x == n_y assumed here).
n_grid = int(np.sqrt(pp.shape[0]))
xx_g = pp[:, 0].reshape(n_grid, n_grid)
yy_g = pp[:, 1].reshape(n_grid, n_grid)
zz_g = enmap.reshape(n_grid, n_grid)
Map done: 2s (0.05min)
2D translational MEP
find_mep with dim=2 finds the MEP in \((x_\text{cm}, y_\text{cm})\) space at fixed orientation. The cluster pos must be pre-rotated to the desired \(\theta\).
The maximum force magnitude along the MEP is the static friction:
[6]:
p0_2d = [0.0, 0.0]
p1_2d = [1.0, 0.0] # one lattice vector away along x
t0 = time()
mep = find_mep(
pos_rot, en_func, en_inputs,
p0=p0_2d, p1=p1_2d,
n_pt=50, max_steps=3000, dt=1e-4,
fix_ends=True, tol=1e-8,
)
te = time() - t0
print('String done: %is (%.2fmin) converged=%s steps=%i'
% (te, te/60, mep['converged'], mep['n_steps']))
print('Barrier: %.5g' % mep['barrier'])
pts = mep['points'] # (n_pt, 2): (x_cm, y_cm)
en = mep['energy'] # (n_pt,)
s = np.linspace(0, 1, len(pts))
String done: 0s (0.00min) converged=True steps=1
Barrier: 48.326
[7]:
fig, (axE, axpath) = plt.subplots(1, 2, dpi=150, figsize=(8, 3.5))
# Energy landscape with MEP overlaid
axE.contourf(xx_g, yy_g, zz_g, levels=20, cmap='RdYlBu_r', alpha=0.15)
axE.contour( xx_g, yy_g, zz_g, levels=20, cmap='RdYlBu_r', linewidths=0.5)
plot_BZ2d(axE, get_brillouin_zone_2d(S), bz_kw)
axE.quiver(0, 0, *S[0], angles='xy', scale_units='xy', scale=1,
zorder=5, color='red')
axE.quiver(0, 0, *S[1], angles='xy', scale_units='xy', scale=1,
zorder=5, color='orange')
axE.plot([p0_2d[0], p1_2d[0]], [p0_2d[1], p1_2d[1]],
'-.', color='green', lw=1, label='initial straight path', zorder=1)
axE.plot(pts[:, 0], pts[:, 1], '-k', lw=0.8, label='MEP', zorder=2)
axE.scatter(pts[:, 0], pts[:, 1], c=en, cmap='magma', s=4, zorder=3)
axE.set_xlim([-0.7, 1.1])
axE.set_ylim([-0.8, 0.9])
axE.set_xlabel(r'$x_\mathrm{cm}$ [a.u.]')
axE.set_ylabel(r'$y_\mathrm{cm}$ [a.u.]')
axE.legend(loc='upper right', fontsize=7)
plt_cosmetic(axE)
# Energy profile along MEP
axpath.plot(s, en, '-k')
axpath.scatter(s, en, c=en, cmap='magma', s=20, zorder=2)
axpath.set_xlabel('normalised arc length')
axpath.set_ylabel(r'energy [$\epsilon$]')
axpath.set_title('barrier = %.4g $\\epsilon$' % mep['barrier'])
plt.tight_layout()
plt.show()
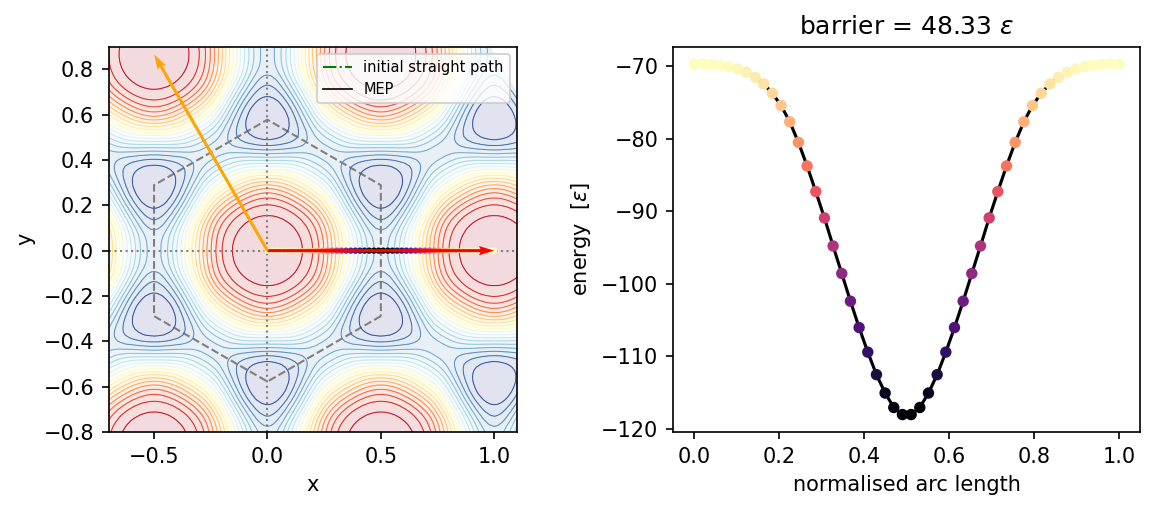
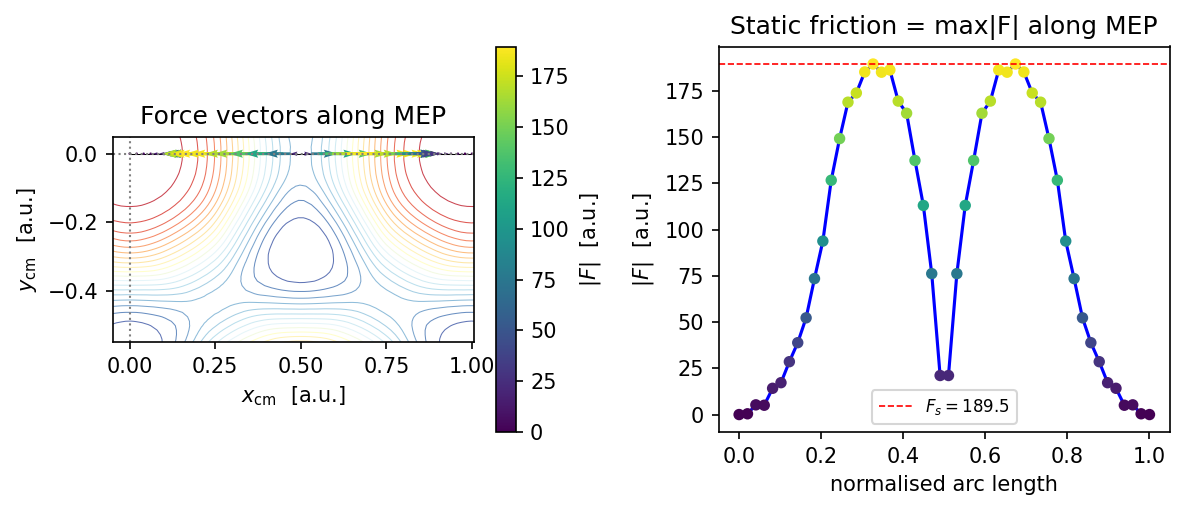
Force along the MEP — static friction
The gradient returned by find_mep is \(-dE/d\mathbf{r}_\text{cm}\), i.e. the force at each path point. Its maximum magnitude is the static friction force \(F_s\): the minimum external force needed to push the cluster over the barrier.
[8]:
grad = -mep['gradient'] # (n_pt, 2): force at each path point
Fpath = np.linalg.norm(grad, axis=1)
print('Static friction Fs = max|F| = %.5g' % Fpath.max())
fig, (axE, axpath) = plt.subplots(1, 2, dpi=150, figsize=(8, 3.5))
axE.contour(xx_g, yy_g, zz_g, levels=20, cmap='RdYlBu_r', linewidths=0.5, alpha=0.8)
axE.plot(pts[:, 0], pts[:, 1], '-k', lw=0.5, zorder=1)
qv = axE.quiver(pts[:, 0], pts[:, 1],
grad[:, 0], grad[:, 1], Fpath,
angles='xy', scale_units='xy', scale=1e3,
zorder=2, cmap='viridis')
plt.colorbar(qv, ax=axE, label=r'$|F|$ [a.u.]')
plt_cosmetic(axE)
axE.set_xlim([-0.05, 1.005])
axE.set_ylim([-0.55, 0.05])
axE.set_xlabel(r'$x_\mathrm{cm}$ [a.u.]')
axE.set_ylabel(r'$y_\mathrm{cm}$ [a.u.]')
axE.set_title('Force vectors along MEP')
axpath.plot(s, Fpath, '-b')
axpath.scatter(s, Fpath, c=Fpath, cmap='viridis', s=20, zorder=2)
axpath.axhline(Fpath.max(), ls='--', color='red', lw=0.8,
label=r'$F_s = %.4g$' % Fpath.max())
axpath.set_xlabel('normalised arc length')
axpath.set_ylabel(r'$|F|$ [a.u.]')
axpath.set_title('Static friction = max|F| along MEP')
axpath.legend(fontsize=8)
plt.tight_layout()
plt.show()
Static friction Fs = max|F| = 189.54
3D roto-translational MEP
Here the configuration space is 3D: \((x_\text{cm}, y_\text{cm}, \theta)\). The string method finds the MEP in this space, so both translation and rotation are free to relax simultaneously.
Scaled arc-length metric
The three coordinates have different units (length vs. degrees), so we rescale them before computing arc lengths:
Here \(l_x = l_y = 1\) (substrate lattice spacing) and \(l_\theta = 60°\) (the angular period for commensurate triangular-on-triangular contact). With this metric all three degrees of freedom contribute equally to the path length.
Important: for
find_mepwithdim=3,posmust be in the reference frame (\(\theta = 0\), CM at origin). The string method applies rotation internally at each path point. Do not pre-rotateposbefore calling.
[9]:
# Commensurate system: sinusoidal triangular substrate, small cluster.
ks = get_ks(1, 3, 4./3., 0.) # triangular wave vectors
params_comm = {
'sub_basis': [[0, 0]],
'epsilon': 1,
'well_shape': 'sin',
'ks': ks,
'a1': np.array([1., 0.]),
'a2': np.array([1./2., -sqrt(3.)/2.]),
'cl_basis': [[0, 0]],
'cluster_shape': 'circle',
'N1': 9, 'N2': 9, # small cluster for speed
'theta': 0.0, 'pos_cm': [0, 0],
}
pen_func_c, en_func_c, en_inputs_c = substrate_from_params(params_comm)
pos_c = cluster_from_params(params_comm)
N_c = pos_c.shape[0]
print('Commensurate cluster N=%i' % N_c)
Commensurate cluster N=85
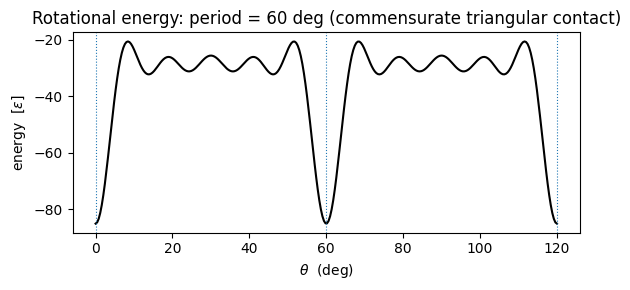
Sanity check: rotational period
Before computing the 3D MEP, verify that the angular period is 60 deg as expected for triangular-on-triangular contact.
[10]:
theta_vals = np.linspace(0, 120, 300) # two full periods
rot_result = rotational_map(pos_c, en_func_c, en_inputs_c,
theta_deg=theta_vals, pos_cm=[0, 0])
fig, ax = plt.subplots(dpi=100, figsize=(6, 3))
ax.plot(theta_vals, rot_result['energy'], '-k')
for t0_v in [0, 60, 120]:
ax.axvline(t0_v, ls=':', color='tab:blue', lw=0.8)
ax.set_xlabel(r'$\theta$ (deg)')
ax.set_ylabel(r'energy [$\epsilon$]')
ax.set_title('Rotational energy: period = 60 deg (commensurate triangular contact)')
plt.tight_layout()
plt.show()
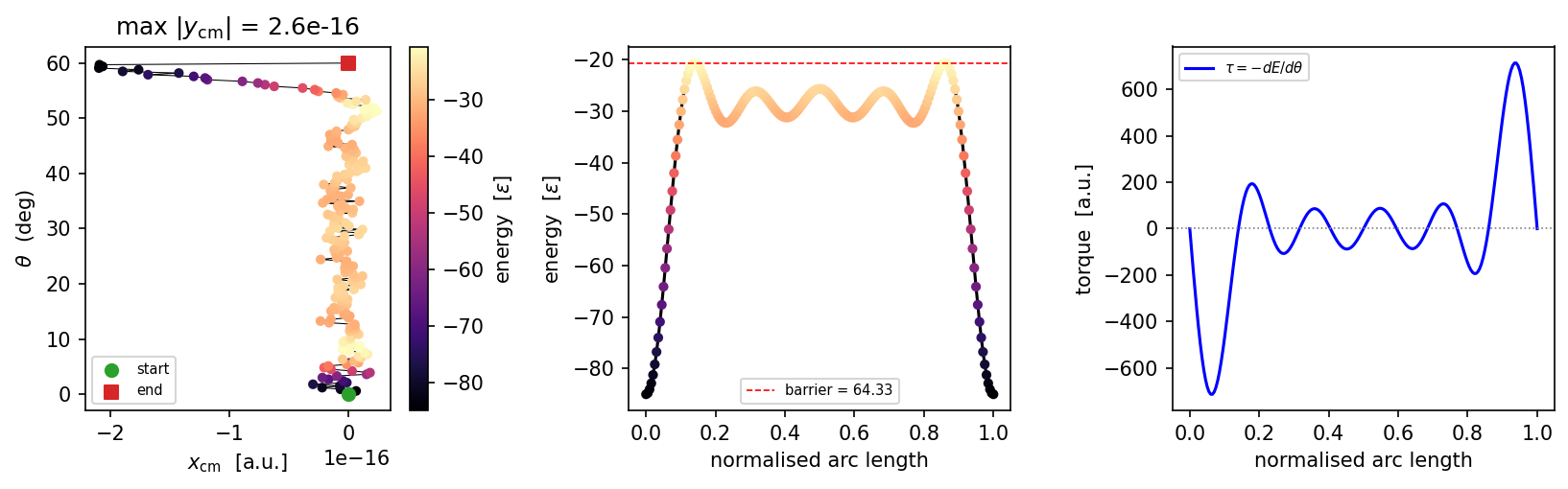
Pure rotational MEP (\(\theta: 0 \to 60°\))
The cluster starts at \(\theta = 0\) and rotates to the next equivalent minimum at \(\theta = 60°\). The barrier in this 1D scan gives the rotational depinning torque.
[11]:
p0_3d = [0.0, 0.0, 0.0] # x_cm, y_cm, theta [deg]
p1_3d = [0.0, 0.0, 60.0] # next equivalent minimum (pure rotation)
# ltheta = 60 deg makes the angular coordinate dimensionally compatible
# with the translational ones (both scaled to O(1)).
ltheta = 60.0
scale_3d = [1.0, 1.0, ltheta]
t0 = time()
mep3 = find_mep(
pos_c, en_func_c, en_inputs_c, # reference-frame pos -- NOT pre-rotated
p0=p0_3d, p1=p1_3d,
n_pt=200, max_steps=5000, dt=1e-3,
fix_ends=True, tol=1e-2,
scale=scale_3d,
)
te = time() - t0
print('3D MEP done: %is converged=%s steps=%i'
% (te, mep3['converged'], mep3['n_steps']))
print('Rotational barrier: %.5g' % mep3['barrier'])
pts3 = mep3['points'] # (n_pt, 3): x_cm, y_cm, theta_deg
en3 = mep3['energy']
grad3 = mep3['gradient'] # (n_pt, 3): Fx, Fy, tau
s3 = np.linspace(0, 1, len(pts3))
3D MEP done: 0s converged=True steps=1
Rotational barrier: 64.326
[12]:
fig, axes = plt.subplots(1, 3, dpi=150, figsize=(11, 3.5))
ax_xt, ax_en, ax_tau = axes
# Path in (x_cm, theta) space, coloured by energy.
# y_cm should remain ~0 by symmetry for this pure-rotation path.
sc = ax_xt.scatter(pts3[:, 0], pts3[:, 2], c=en3, cmap='magma', s=15, zorder=3)
ax_xt.plot(pts3[:, 0], pts3[:, 2], '-k', lw=0.5, zorder=2)
ax_xt.scatter([p0_3d[0]], [p0_3d[2]], marker='o', color='tab:green', s=40, zorder=4, label='start')
ax_xt.scatter([p1_3d[0]], [p1_3d[2]], marker='s', color='tab:red', s=40, zorder=4, label='end')
plt.colorbar(sc, ax=ax_xt, label=r'energy [$\epsilon$]')
ax_xt.set_xlabel(r'$x_\mathrm{cm}$ [a.u.]')
ax_xt.set_ylabel(r'$\theta$ (deg)')
ax_xt.set_title(r'max $|y_\mathrm{cm}|$ = %.2g' % np.abs(pts3[:, 1]).max())
ax_xt.legend(fontsize=7)
# Energy profile.
ax_en.plot(s3, en3, '-k')
ax_en.scatter(s3, en3, c=en3, cmap='magma', s=15, zorder=2)
ax_en.axhline(en3.max(), ls='--', color='red', lw=0.8,
label='barrier = %.4g' % mep3['barrier'])
ax_en.set_xlabel('normalised arc length')
ax_en.set_ylabel(r'energy [$\epsilon$]')
ax_en.legend(fontsize=7)
# Torque along path: tau = -dE/dtheta drives the rotation.
ax_tau.plot(s3, grad3[:, 2], '-b', label=r'$\tau = -dE/d\theta$')
ax_tau.axhline(0, ls=':', color='gray', lw=0.8)
ax_tau.set_xlabel('normalised arc length')
ax_tau.set_ylabel(r'torque [a.u.]')
ax_tau.legend(fontsize=7)
plt.tight_layout()
plt.show()
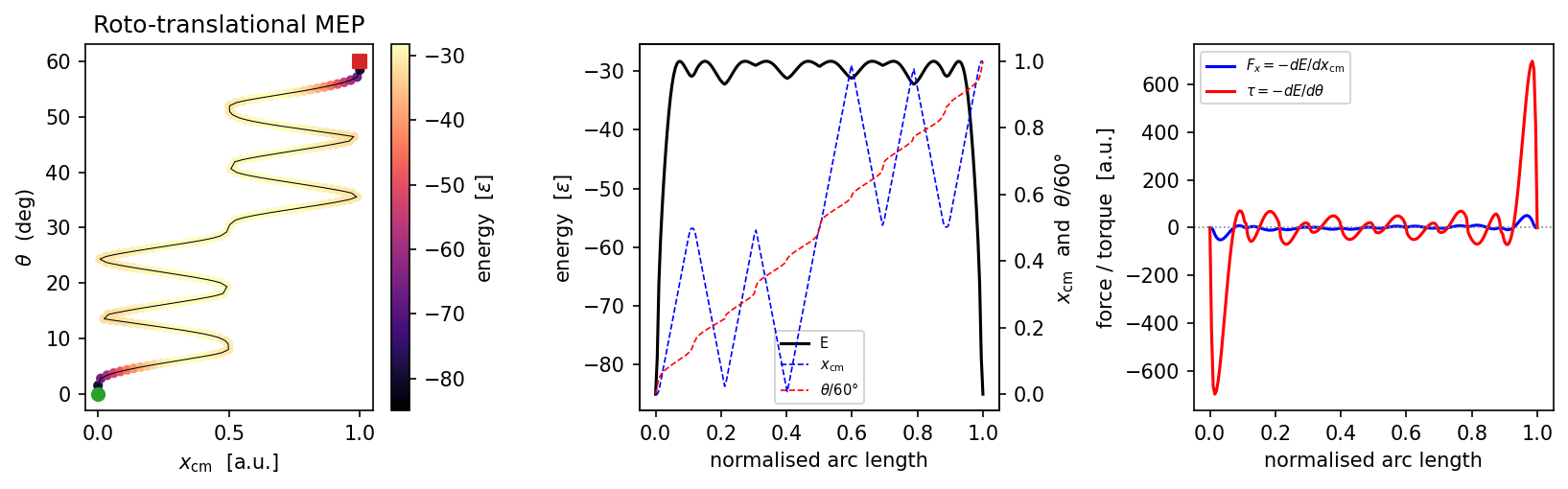
Roto-translational MEP (\(x_\text{cm}: 0 \to 1\), \(\theta: 0 \to 60°\))
A more physically rich path: the cluster translates by one lattice vector and rotates to the next commensurate orientation simultaneously. This is the typical depinning trajectory when both translational and rotational degrees of freedom are active — the kind of motion observed in Moiré heterostructure experiments.
[13]:
p0_rt = [0.0, 0.0, 0.0]
p1_rt = [1.0, 0.0, 60.0] # one lattice step in x + one angular period
t0 = time()
mep_rt = find_mep(
pos_c, en_func_c, en_inputs_c,
p0=p0_rt, p1=p1_rt,
n_pt=200, max_steps=1000, dt=1e-3,
fix_ends=True, tol=1e-4,
scale=scale_3d,
)
te = time() - t0
print('Roto-translational MEP: %is converged=%s barrier=%.5g'
% (te, mep_rt['converged'], mep_rt['barrier']))
pts_rt = mep_rt['points']
en_rt = mep_rt['energy']
grad_rt = mep_rt['gradient']
s_rt = np.linspace(0, 1, len(pts_rt))
Roto-translational MEP: 11s converged=False barrier=56.667
[14]:
fig, axes = plt.subplots(1, 3, dpi=150, figsize=(11, 3.5))
ax_xt, ax_en, ax_fg = axes
sc = ax_xt.scatter(pts_rt[:, 0], pts_rt[:, 2], c=en_rt, cmap='magma', s=15)
ax_xt.plot(pts_rt[:, 0], pts_rt[:, 2], '-k', lw=0.5)
ax_xt.scatter([p0_rt[0]], [p0_rt[2]], marker='o', color='tab:green', s=40, zorder=4)
ax_xt.scatter([p1_rt[0]], [p1_rt[2]], marker='s', color='tab:red', s=40, zorder=4)
plt.colorbar(sc, ax=ax_xt, label=r'energy [$\epsilon$]')
ax_xt.set_xlabel(r'$x_\mathrm{cm}$ [a.u.]')
ax_xt.set_ylabel(r'$\theta$ (deg)')
ax_xt.set_title('Roto-translational MEP')
# Energy + x_cm + theta along path (on twin axes for scale).
ax_en.plot(s_rt, en_rt, '-k', label='E')
axt2 = ax_en.twinx()
axt2.plot(s_rt, pts_rt[:, 0], '--b', lw=0.8, label=r'$x_\mathrm{cm}$')
axt2.plot(s_rt, pts_rt[:, 2]/ltheta, '--r', lw=0.8, label=r'$\theta/60°$')
axt2.set_ylabel(r'$x_\mathrm{cm}$ and $\theta/60°$')
lines1, labs1 = ax_en.get_legend_handles_labels()
lines2, labs2 = axt2.get_legend_handles_labels()
ax_en.legend(lines1+lines2, labs1+labs2, fontsize=7)
ax_en.set_xlabel('normalised arc length')
ax_en.set_ylabel(r'energy [$\epsilon$]')
# Fx and tau along path -- show what drives each degree of freedom.
ax_fg.plot(s_rt, grad_rt[:, 0], '-b', label=r'$F_x = -dE/dx_\mathrm{cm}$')
ax_fg.plot(s_rt, grad_rt[:, 2], '-r', label=r'$\tau = -dE/d\theta$')
ax_fg.axhline(0, ls=':', color='gray', lw=0.8)
ax_fg.set_xlabel('normalised arc length')
ax_fg.set_ylabel('force / torque [a.u.]')
ax_fg.legend(fontsize=7)
plt.tight_layout()
plt.show()